Hello Terry,
following the LoRa code:
#include "userdefines.h"
// Compile this only if we have a LoRa capable hardware
// loraWan hardware related code
// code based on free-to-use / do-anything-what-you-want-with-it example code
// by Thomas Telkamp, Matthijs Kooijman and Terry Moore, MCCI.
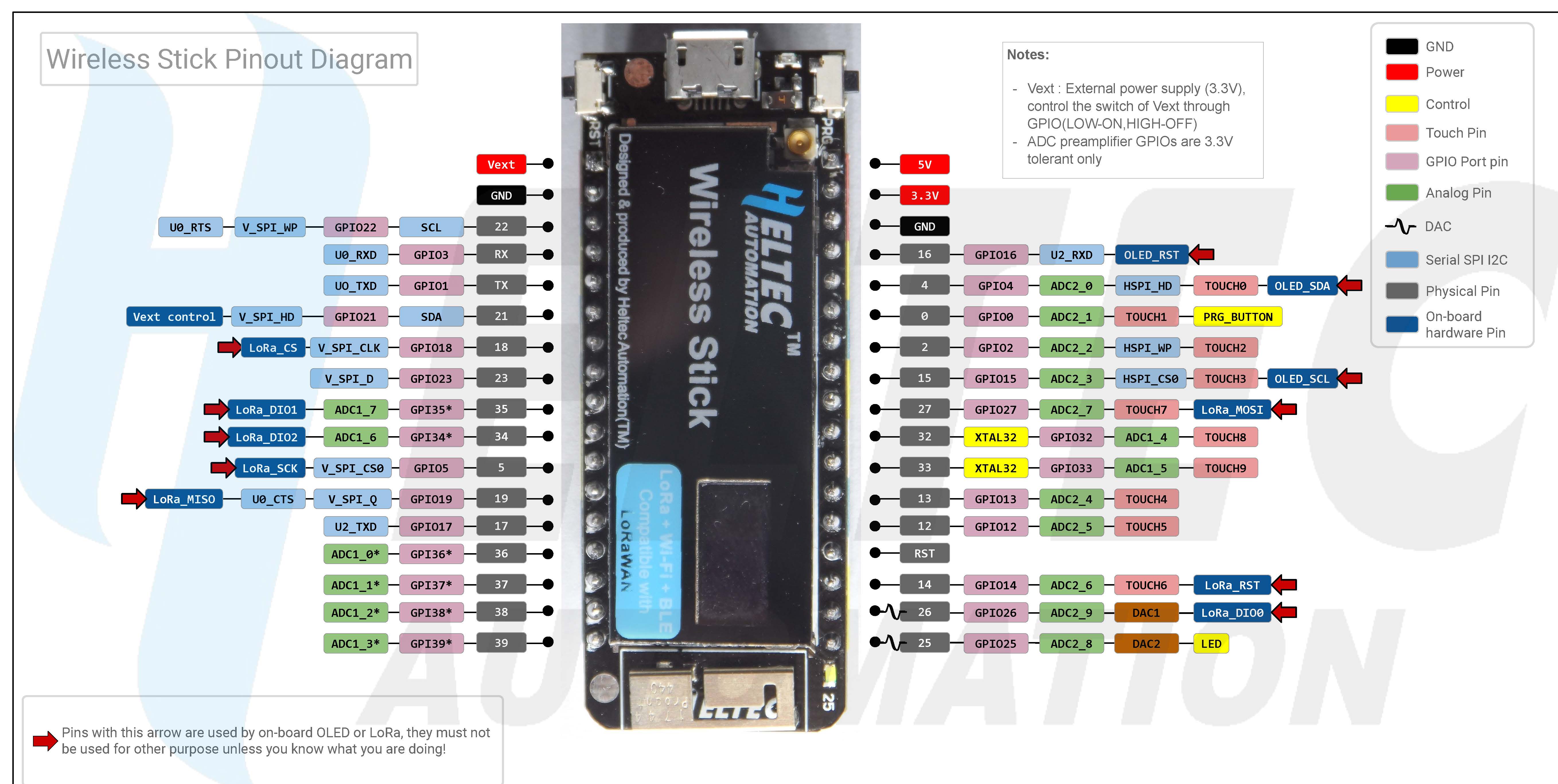
// IOs for optional LoRa
//
// SX1276 (pin) => ESP32 (pin)
// ===========================
// SCK = GPIO5
// MISO = GPIO19
// MOSI = GPIO27
// CS = GPIO18
// RESET = GPIO14
// DIO0 (8) = GPIO26 (15)
// DIO1 (9) = GPIO33 (13)
// DIO2 (10) = GPIO32 (12)
// Send a valid LoRaWAN packet using frequency and encryption settings matching
// those of the The Things Network.
//
// This uses OTAA (Over-the-air activation), where where a DevEUI and
// application key is configured, which are used in an over-the-air
// activation procedure where a DevAddr and session keys are
// assigned/generated for use with all further communication.
//
// Note: LoRaWAN per sub-band duty-cycle limitation is enforced (1% in
// g1, 0.1% in g2), but not the TTN fair usage policy.
//
// To use this code, first register your application and device with
// the things network, to set or generate an AppEUI, DevEUI and AppKey.
// Multiple devices can use the same AppEUI, but each device has its own
// DevEUI and AppKey.
//
// Do not forget to define the radio type correctly in
// arduino-lmic/project_config/lmic_project_config.h or from your BOARDS.txt.
#include <Arduino.h>
#include <lmic.h>
#include <hal/hal.h>
#include "hal/heltecv2.h"
#include <SPI.h>
#include "webconf.h"
#include "utils.h"
#include "loraWan.h"
#include "log.h"
// All these 3 LoRa parameters (DEVEUI, APPEUI and APPKEY) may be copied literally from the TTN console window.
// The necessary reversal on DEVEUI and APPEUI is done by hex2data.
void os_getArtEui(u1_t *buf) {
(void) hex2data(buf, (const char *) appeui, 8);
reverseByteArray(buf, 8);
}
void os_getDevEui(u1_t *buf) {
(void) hex2data(buf, (const char *) deveui, 8);
reverseByteArray(buf, 8);
}
void os_getDevKey(u1_t *buf) {
(void) hex2data(buf, (const char *) appkey, 16);
}
// Schedule TX every this many seconds (might become longer due to duty cycle limitations).
const unsigned TX_INTERVAL = 10;
// Pin mapping
const lmic_pinmap lmic_pins = {
.nss = LORA_CS,
.rxtx = LMIC_UNUSED_PIN,
.rst = LORA_RST,
.dio = {LORA_IRQ, LORA_IO1, LORA_IO2 },
};
static volatile transmissionStatus_t txStatus;
static uint8_t *__rxPort;
static uint8_t *__rxBuffer;
static uint8_t *__rxSz;
void event_log(const char *event) {
log(DEBUG, "%09d: %s", os_getTime(), event);
}
void onEvent(ev_t ev) {
switch (ev) {
case EV_SCAN_TIMEOUT:
txStatus = TX_STATUS_ENDING_ERROR;
event_log("EV_SCAN_TIMEOUT");
break;
case EV_BEACON_FOUND:
txStatus = TX_STATUS_UNKNOWN;
event_log("EV_BEACON_FOUND");
break;
case EV_BEACON_MISSED:
txStatus = TX_STATUS_UNKNOWN;
event_log("EV_BEACON_MISSED");
break;
case EV_BEACON_TRACKED:
txStatus = TX_STATUS_UNKNOWN;
event_log("EV_BEACON_TRACKED");
break;
case EV_JOINING:
txStatus = TX_STATUS_JOINING;
event_log("EV_JOINING");
break;
case EV_JOINED:
txStatus = TX_STATUS_JOINED;
event_log("EV_JOINED");
{
u4_t netid = 0;
devaddr_t devaddr = 0;
u1_t nwkKey[16];
u1_t artKey[16];
LMIC_getSessionKeys(&netid, &devaddr, nwkKey, artKey);
String ak, nk;
for (int i = 0; i < sizeof(artKey); ++i) {
ak += String(artKey[i], 16);
}
for (int i = 0; i < sizeof(nwkKey); ++i) {
nk += String(nwkKey[i], 16);
}
log(DEBUG, "netid: %d devaddr: %x artKey: %s nwkKey: %s", netid, devaddr, ak.c_str(), nk.c_str());
}
// Disable link check validation (automatically enabled
// during join, but because slow data rates change max TX
// size, we don't use it in this example.
LMIC_setLinkCheckMode(0);
break;
// This event is defined but not used in the code.
// No point in wasting codespace on it.
// case EV_RFU1:
// event_log("EV_RFU1");
// break;
case EV_JOIN_FAILED:
txStatus = TX_STATUS_ENDING_ERROR;
event_log("EV_JOIN_FAILED");
break;
case EV_REJOIN_FAILED:
txStatus = TX_STATUS_ENDING_ERROR;
event_log("EV_REJOIN_FAILED");
break;
case EV_TXCOMPLETE:
event_log("EV_TXCOMPLETE (includes waiting for RX windows)");
txStatus = TX_STATUS_UPLINK_SUCCESS;
if (LMIC.txrxFlags & TXRX_ACK) {
txStatus = TX_STATUS_UPLINK_ACKED;
event_log("Received ack");
}
if (LMIC.dataLen) {
log(DEBUG, "Received %d bytes of payload", LMIC.dataLen);
if (__rxPort != NULL) *__rxPort = LMIC.frame[LMIC.dataBeg - 1];
if (__rxSz != NULL) *__rxSz = LMIC.dataLen;
if (__rxBuffer != NULL) memcpy(__rxBuffer, &LMIC.frame[LMIC.dataBeg], LMIC.dataLen);
txStatus = TX_STATUS_UPLINK_ACKED_WITHDOWNLINK;
}
break;
case EV_LOST_TSYNC:
txStatus = TX_STATUS_ENDING_ERROR;
event_log("EV_LOST_TSYNC");
break;
case EV_RESET:
txStatus = TX_STATUS_ENDING_ERROR;
event_log("EV_RESET");
break;
case EV_RXCOMPLETE:
// data received in ping slot
txStatus = TX_STATUS_UNKNOWN;
event_log("EV_RXCOMPLETE");
break;
case EV_LINK_DEAD:
txStatus = TX_STATUS_ENDING_ERROR;
event_log("EV_LINK_DEAD");
break;
case EV_LINK_ALIVE:
txStatus = TX_STATUS_UNKNOWN;
event_log("EV_LINK_ALIVE");
break;
// This event is defined but not used in the code.
// No point in wasting codespace on it.
// case EV_SCAN_FOUND:
// event_log("EV_SCAN_FOUND");
// break;
case EV_TXSTART:
txStatus = TX_STATUS_UNKNOWN;
event_log("EV_TXSTART");
break;
default:
txStatus = TX_STATUS_UNKNOWN;
log(DEBUG, "Unknown event: %u", (unsigned int) ev);
break;
}
}
void setup_lorawan() {
txStatus = TX_STATUS_UNKNOWN;
// LMIC init
os_init();
// Reset the MAC state. Session and pending data transfers will be discarded.
LMIC_reset();
LMIC_setClockError(MAX_CLOCK_ERROR * 1 / 100);
// Setup the LoRaWan stack for TTN Europe
LMIC_setupChannel(0, 868100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(1, 868300000, DR_RANGE_MAP(DR_SF12, DR_SF7B), BAND_CENTI); // g-band
LMIC_setupChannel(2, 868500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(3, 867100000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(4, 867300000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(5, 867500000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(6, 867700000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(7, 867900000, DR_RANGE_MAP(DR_SF12, DR_SF7), BAND_CENTI); // g-band
LMIC_setupChannel(8, 868800000, DR_RANGE_MAP(DR_FSK, DR_FSK), BAND_MILLI); // g2-band
LMIC_setLinkCheckMode(0);
LMIC.dn2Dr = SF9;
LMIC_setDrTxpow(DR_SF7, 14);
}
// Send LoRaWan frame with ack or not
// - txPort : port to transmit
// - txBuffer : message to transmit
// - txSz : size of the message to transmit
// - ack : true for message ack & downlink / false for pure uplink
// When Ack is false, the downlink buffer can be set to NULL as rxSz and rPort
// - rxPort : where to write the port where downlink has been received
// - rxBuffer : where the downlinked data will be stored
// - rxSz : size of received data
transmissionStatus_t lorawan_send(uint8_t txPort, uint8_t *txBuffer, uint8_t txSz, bool ack, uint8_t *rxPort, uint8_t *rxBuffer, uint8_t *rxSz) {
// Check if there is not a current TX/RX job running
if (LMIC.opmode & OP_TXRXPEND) {
log(DEBUG, "OP_TXRXPEND, not sending");
return TX_STATUS_ENDING_ERROR;
} else {
txStatus = TX_STATUS_UNKNOWN;
__rxPort = rxPort;
__rxBuffer = rxBuffer;
__rxSz = rxSz;
// Prepare upstream data transmission at the next possible time.
LMIC_setTxData2(txPort, txBuffer, txSz, ((ack) ? 1 : 0));
// wait for completion
uint64_t start = millis();
while (true) {
switch (txStatus) {
case TX_STATUS_UNKNOWN:
case TX_STATUS_JOINING:
case TX_STATUS_JOINED:
os_runloop_once();
break;
case TX_STATUS_UPLINK_SUCCESS:
case TX_STATUS_UPLINK_ACKED:
case TX_STATUS_UPLINK_ACKED_WITHDOWNLINK:
case TX_STATUS_UPLINK_ACKED_WITHDOWNLINK_PENDING:
return txStatus;
case TX_STATUS_ENDING_ERROR:
case TX_STATUS_TIMEOUT:
break;
}
if (millis() - start > LORA_TIMEOUT_MS) {
setup_lorawan();
return TX_STATUS_TIMEOUT;
}
}
}
}
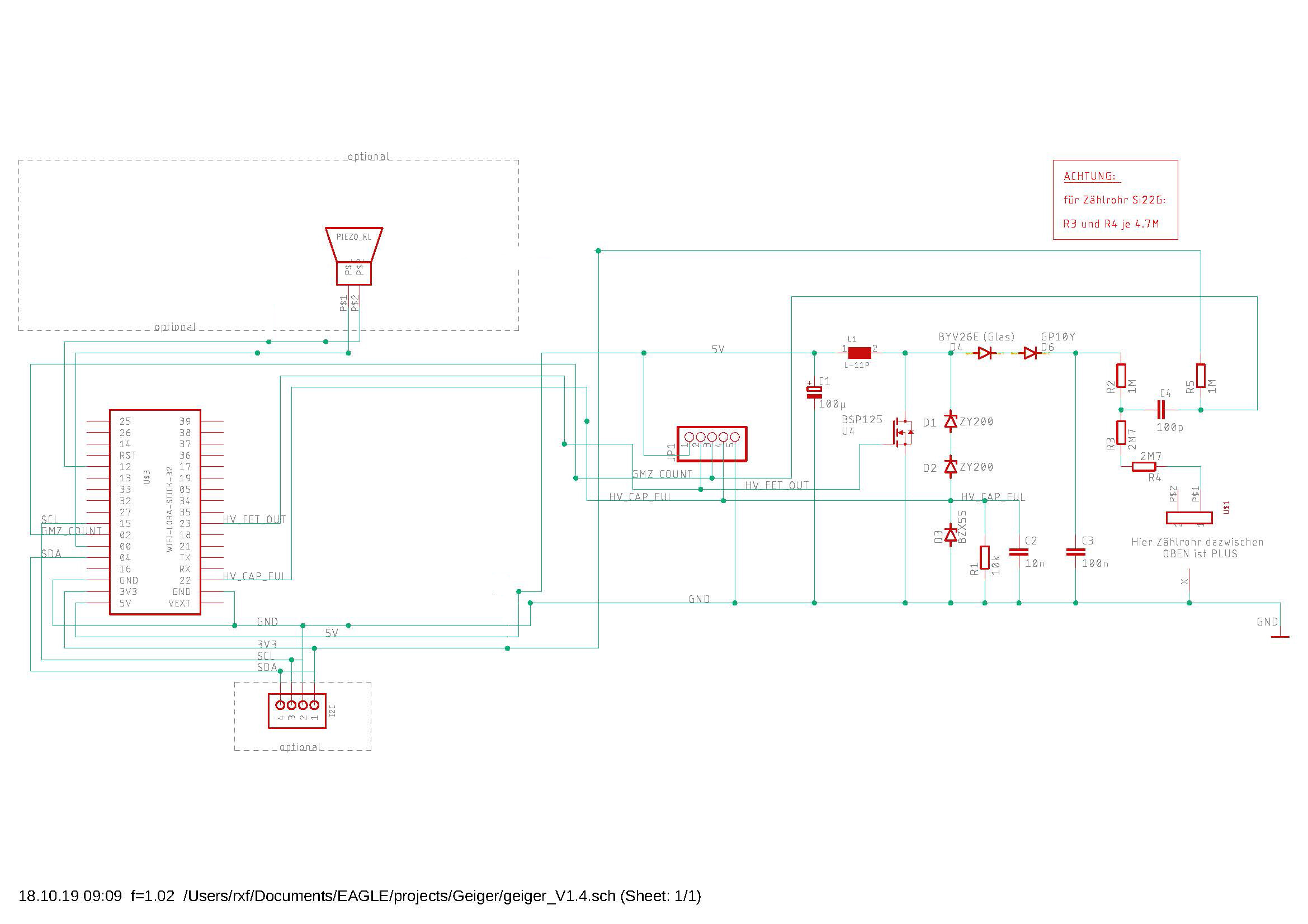
And here the schematic of the device:
This is based on a project, designed by Jürgen Böhringer and his friends.
More details are available under https://github.com/ecocurious2/MultiGeiger.
Best regards
Paul.